|
2020─Ļ10į┬Future Robot ═Ų│÷┴╦ų¦│ųIntel Ą┌6Īó7Īó8Īó9┤·CPU + FPGAöUš╣Ą─ęĢėX║═▀\äė┐žųŲĮŌøQĘĮ░ĖV510ŽĄ┴ąŻ¼▀@éĆĘĮ░ĖŠ▀ėąąį─▄ÅŖ┤¾Īóķ_Ę┼┐“╝▄Īó┐╔┐┐ęūė├Ą─ā×(y©Łu)ä▌║═╠ž³cĪŻ

V510ŽĄ┴ąĘĮ░Ėų¦│ųEtherCATų„šŠŻ¼ų¦│ųūŅČÓ 64▌S▀\äė┐žųŲ║═128éĆEtherCATÅ─šŠ Ż¼ EtherCAT┐žųŲų▄Ų┌┐╔┐sČ╠ų┴00μs Ż¼ų¦│ų│Ż?Ą─ų„┴„EtherCAT“īäė║═IOŻ╗į┌▀\äė┐žųŲĘĮ├µŻ¼V510ŽĄ┴ąų¦│ų2▌SŲĮ├µ▓ÕčaĪó3▌S┐šķg▓ÕčaĪóļŖūė ═╣▌åĄ╚Ė▀╝ē▀\äė┐žųŲ╣”─▄Ż¼┐╔ęį▀MąąTą═┼cSą═╦┘Č╚Ū·ŠĆęÄ(gu©®)äØŻ¼ūŅČÓų¦│ų4éĆū°ś╦ŽĄ▀B└m(x©┤)▓ÕčaŻ╗V510ŽĄ┴ąĘĮ░ĖŠ▀éõžSĖ╗Ą─IOĮė┐┌Ż¼ā╚(n©©i)ų├64Ė▀╦┘IOŻ¼░³└©ūŅČÓ16┬Ę200KHz Ė▀╦┘├}ø_▌ö│÷║═4┬Ę200KHz ABŽÓĖ▀╦┘ėŗöĄ(sh©┤)Ż¼║═6éĆintel i21XŽĄ┴ąŪ¦šūęį╠½ŠW(w©Żng)┐┌Ż╗V510ŽĄ┴ąį┌ÖCŲ„ęĢėXĘĮ├µų¦│ų│Żė├Ą─ÖCŲ„łDŽ±╦ŃĘ©ė├ė┌ęĢėXę²ī¦ ║═£y┴┐æ¬ė├ Ż¼ā╚(n©©i)ų├┴╦│Żė├ÖCąĄĮYśŗĄ─ī”╬╗╦ŃĘ©Ż¼▓óų¦│ųė├æ¶ūįČ©┴x³cī”╬╗╦ŃĘ©Ż╗ų¦│ųPLCŠÄ│╠šZčį:LDĪóC║═ST Ż¼ ų¦│ųC#ĪóC++Ą╚Ė▀╝ēšZčį│╠ą“ķ_░l(f©Ī) Ż¼ ÖCŲ„│╠ą“¬Ü┴ó▀\ąąė┌īŹĢrŽĄĮy(t©»ng)Ż¼╝┤╩╣ Microsoft Windows│÷¼F(xi©żn)«É│Żę▓─▄ĘĆ(w©¦n)Č©▀\ąąĪŻ
 V510ŽĄ┴ąĘĮ░Ė▓╔ė├ņ`╗ŅĄ─API║»öĄ(sh©┤)š{ė├Ż¼▓óĮY║ŽC#ĪóC++Ą╚Ė▀╝ēšZčįķ_░l(f©Ī)Łh(hu©ón)Š│║═PLCķ_░l(f©Ī)Łh(hu©ón)Š│ęį╝░īŹĢrŽĄĮy(t©»ng)Ą─╠ž³cŻ¼Ė─▀M┴╦▓┘ū„▀ē▌ŗ║═Įń├µŻ¼┐╔ęįĘĮ▒ŃĄžĮ©┴ó┐ņ╦┘Īóų▒ĮėĄ─öĄ(sh©┤)ō■(j©┤)µ£ĮėĪŻ V510ŽĄ┴ąĘĮ░Ė▓╔ė├ņ`╗ŅĄ─API║»öĄ(sh©┤)š{ė├Ż¼▓óĮY║ŽC#ĪóC++Ą╚Ė▀╝ēšZčįķ_░l(f©Ī)Łh(hu©ón)Š│║═PLCķ_░l(f©Ī)Łh(hu©ón)Š│ęį╝░īŹĢrŽĄĮy(t©»ng)Ą─╠ž³cŻ¼Ė─▀M┴╦▓┘ū„▀ē▌ŗ║═Įń├µŻ¼┐╔ęįĘĮ▒ŃĄžĮ©┴ó┐ņ╦┘Īóų▒ĮėĄ─öĄ(sh©┤)ō■(j©┤)µ£ĮėĪŻ
╚ńŽ┬łDųąĄ─³c─ząąśI(y©©)æ¬ė├░Ė└²Ż¼ė├æ¶┐╔ęį═©▀^š{ė├Ą─ā╚(n©©i)ų├┐ž╝■ÄņųąĄ─CAD┐ž╝■Ż¼ī¦╚ļ╗“└LųŲ▀\äė▄ē█EŻ¼▓óų▒Įė▐D╗»×ķ▌SĄ─▀\äėöĄ(sh©┤)ō■(j©┤)ĪŻė├æ¶▀Ć┐╔ęį═©▀^ķ_Ę┼Ą─Įė┐┌ī”ā╚(n©©i)ų├Ą─┐ž╝■▀MąąĖ─įņŻ¼ūīś╦£╩Ą─CAD┐ž╝■ūā│╔┴╦▀m║Ž³c─ząąśI(y©©)æ¬ė├Ą─ąąśI(y©©)┐ž╝■Ż¼į÷╝ė³c─zŽÓĻPĄ─╩ŠĮ╠ą┼Žó┴ą▒ĒĪó┬ĘÅĮ║═Į╩ųųĖ╬╗ų├Ą─Ņü╔½ÅŖ╗»Ą╚ą┼ŽóŻ¼╩╣ė├ŲüĒĖ³╝ė▒ŃĮ▌ĪŻ
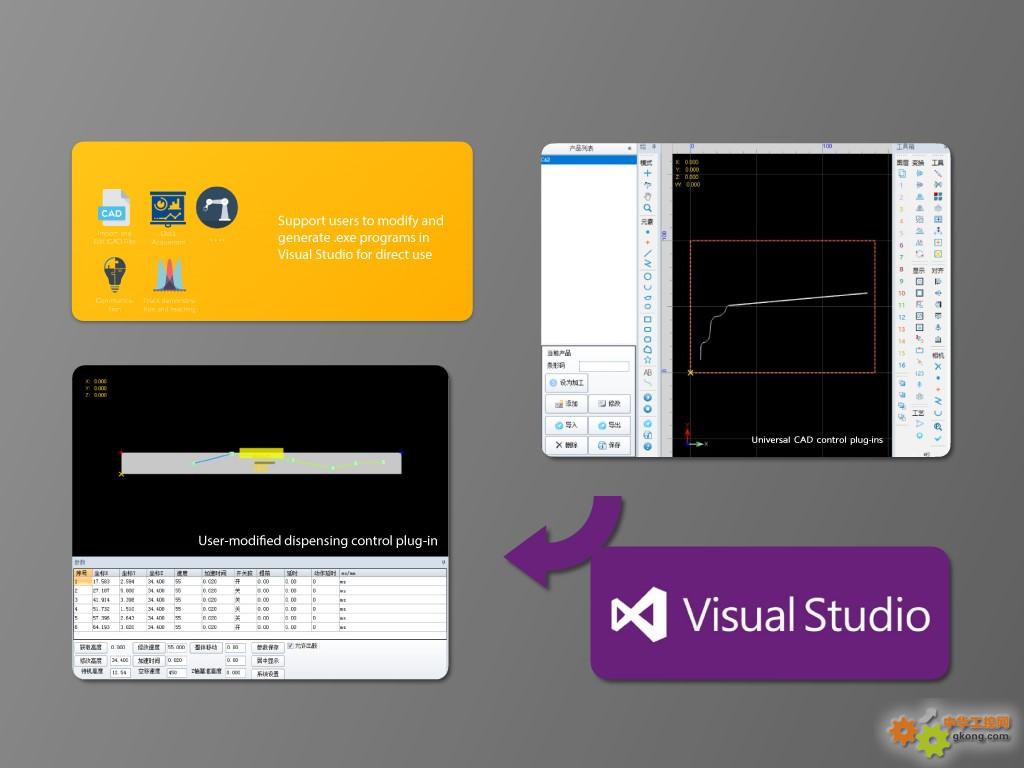
łD└²Ż║ė├æ¶┐╔ŠÄ▌ŗĄ─CAD┐ž╝■ĪŻ
į┌╣żśI(y©©)¼F(xi©żn)ł÷Ą─æ¬ė├ł÷Š░└’Ż¼║▄ČÓ╣ż│╠Ĥ║═ĒŚ─┐Įø(j©®ng)└ĒĖ³āAŽ“╩╣ė├╠▌ą╬łD╗“STŻ¼ķ_░l(f©Ī)įOéõĄ─▀ē▌ŗ║═▀\äė┐žųŲ╣”─▄ĪŻī”ė┌ÖCŲ„éĆąį╗»Ą─╩ŠĮ╠║═’@╩ŠĮń├µŻ¼ęį╝░┼c╔Ž╬╗ŽĄĮy(t©»ng)Ą─═©ėŹ╣”─▄Ż¼═©▀^Ė▀╝ēšZčįķ_░l(f©Ī)Ą─Ė„ĘN┐ž╝■ätĖ³╝ėņ`╗Ņ║═ęūė┌š{įćŻ¼▓╔ė├é„Įy(t©»ng)ĘĮ╩ĮąĶę¬į┌ā╔╠ūŽĄĮy(t©»ng)Ą─═©ėŹ╔Ž╗©┘Mę╗Č©Ą─ķ_░l(f©Ī)║═š{įćĢrķgĪŻ
į┌V510ŽĄ┴ąĘĮ░ĖĄ─ā╚(n©©i)ų├Ą─┐“╝▄ųąŻ¼┐╔ęįīóPLCųą╩╣ė├Ą─“ūā┴┐”┴ą▒Ēī¦│÷×ķ╬─╝■Ż¼ė├æ¶┐╔ęįį┌Visual Studioųąī”┤╦╬─╝■▀Mąąą▐Ė─▒Ż┤µ║¾Ż¼į┌│╠ą“ųąų▒Įėūx╚Ī╗“īæ╚ļĪŻ
į┌Future Robot Ą─▀@╠ūęĢėX║═▀\äė┐žųŲĮŌøQĘĮ░ĖųąŻ¼ė├æ¶Ą─PLCęį╝░CšZčį│╠ą“▀\ąąį┌īŹĢrŽĄĮy(t©»ng)ųąŻ©RTOSŻ®ųąŻ¼▀@▓╗āH╩Ūė├æ¶│╠ą“Ż¼▀Ć░³└©ė├æ¶│╠ą“ųąš{ė├Ą─EtherCATģf(xi©”)ūhŚŻŻ¼▀\äė┐žųŲ╦ŃĘ©Ą╚ąĶę¬ĘĆ(w©¦n)Č©▀\ąąĪó┐ņ╦┘Ēææ¬Ą─╣”─▄─ŻēKŻ¼Č╝ąĶę¬▀\ąąį┌īŹĢrŽĄĮy(t©»ng)Ż©RTOSŻ®ųąŻ¼ęį▒ŻūCŽĄĮy(t©»ng)Ą─ĘĆ(w©¦n)Č©║═ąį─▄ĪŻ
V510ŽĄ┴ąĘĮ░Ėę²╚ļ┴╦ķ_Ę┼Ą─īŹĢrŁh(hu©ón)Š│Ż¼ė├æ¶┐╔ęįų▒Įė╩╣ė├Ė▀╝ēšZčįķ_░l(f©Ī)ė├æ¶│╠ą“ĪŻ▓╗═¼ė┌╠ōöMÖC╝╝ągŻ©hypervisorsŻ®ĪóWindowsįOéõ“īäė│╠ą“╗“╩Ūå╬Ų¼ÖCæ¬ė├│╠ą“Ż¼īŹĢrŽĄĮy(t©»ng)╩Ūę╗éĆ═Ļš¹Ą─▓┘ū„ŽĄĮy(t©»ng)Ż¼¬Üš╝Intel CPU▀\╦Ń║╦ą─Īóā╚(n©©i)┤µĪóI/O║═ųąöÓĪŻīŹĢrŽĄĮy(t©»ng)═Ļ╚½¬Ü┴óė┌Microsoft WindowsŻ¼╩ŪĒææ¬ųžę¬╚╬äšūŅ┐ņ╦┘║═ūŅ░▓╚½Ą─▀xō±ĪŻ 
łD└²Ż║īŹĢrŽĄĮy(t©»ng)īŹ¼F(xi©żn)ė├æ¶ĻPµI│╠ą“Ą─ł╠(zh©¬)ąą┼cMicrosoft WindowsĘųļxĪŻ
│²┴╦─▄ē“┐sČ╠ŽĄĮy(t©»ng)Ą─ł╠(zh©¬)ąąų▄Ų┌Ż©Cycle timeŻ®ęį╝░╠ßĖ▀ŽĄĮy(t©»ng)Ą─ĘĆ(w©¦n)Č©ąį═ŌŻ¼╗∙ė┌īŹĢrŽĄĮy(t©»ng)Ą─ė├æ¶│╠ą“┐╔ęįīŹ¼F(xi©żn)é„Įy(t©»ng)▀\äė┐žųŲ┐©ĘĮ░ĖļyęįīŹ¼F(xi©żn)Ą─╣”─▄Ż¼▒╚╚ńŻ║
AĪó▐D▒P╗“┴„╦«ŠĆįOéõųąĮø(j©®ng)│Ż╩╣ė├Ą─é„ĖąŲ„ĄĮ╬╗ą┼╠¢Ż¼é„Įy(t©»ng)ĘĮ░ĖĄ─├}ø_ą┼╠¢▓ČūĮ╚▌ęū╩▄ĄĮWindowsł╠(zh©¬)ąąų▄Ų┌ČČäėĄ─ė░ĒæĪŻīŹĢrŽĄĮy(t©»ng)┐╔ęįīŹ¼F(xi©żn)ŅÉ╦ŲPLC▓┼─▄īŹ¼F(xi©żn)Ą─ĘĆ(w©¦n)Č©Ą─├}ø_▓ČūĮ╣”─▄ĪŻ
BĪóÖCŲ„ęĢėXŅIė“Ą─ė├æ¶Ż¼┐╔ęįīóūį╝║Ą─ęĢėX╦ŃĘ©į┌īŹĢrŽĄĮy(t©»ng)ųąųžą┬ŠÄūgŻ¼═©▀^š{ė├V510ŽĄ┴ąĘĮ░ĖĄ─Ą─īŹĢrGigEģf(xi©”)ūhŻ¼īŹ¼F(xi©żn)ÖCŲ„ęĢėX╣”─▄┼cįOéõŲõ╦¹╣”─▄─ŻēKŻ©╚ń▀\äė┐žųŲŻ®Ą─Ė▀ą¦ĪóĘĆ(w©¦n)Č©Ą─Į╗╗źĪŻ
Ž┬łD╩ŪSMTįOéõł╠(zh©¬)ąąų▄Ų┌Ą─ī”▒╚Ż¼▀\ąąį┌īŹĢrŽĄĮy(t©»ng)ųąĄ─ÖCŲ„ęĢėX┼c▀\äė┐žųŲŻ¼┐╔ęį½@Ą├Ė³║├Ą─ÖCŲ„▀\ąąą¦╣¹ĪŻ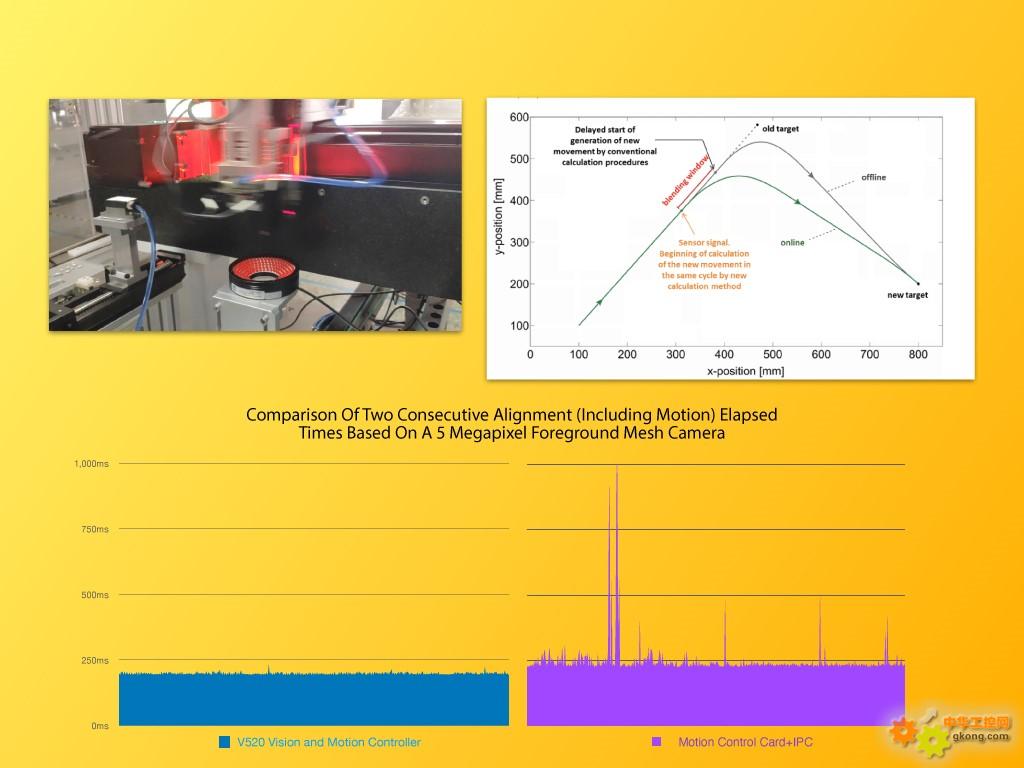
łD└²Ż║SMTįOéõ▓╗═¼ĘĮ░ĖĄ─ł╠(zh©¬)ąąų▄Ų┌ī”▒╚ĪŻ
CĪóßśī”▀\äė┐žųŲŅIė“Ą─┐═æ¶Ż¼┐╔ęįīóūį╝║Ą─ÖCŲ„╚╦Ė·ļS╦ŃĘ©▀\ąąį┌īŹĢrŽĄĮy(t©»ng)ųąŻ¼═©▀^š{ė├V510ŽĄ┴ąĘĮ░ĖųąĄ─N▌S▓ÕčaŻ¼īŹ¼F(xi©żn)Ė³ĘĆ(w©¦n)Č©║═Š½┤_Ą─▀\äė┐žųŲĪŻ
DĪó ė├æ¶┐╔ęįīóŠW(w©Żng)┐┌Īó┤«┐┌ė╔īŹĢrŽĄĮy(t©»ng)╣▄└ĒŻ¼▀mė├ė┌ę¬Ū¾Ė▀╦┘╝░ĘĆ(w©¦n)Č©═©ėŹĄ─æ¬ė├ł÷║ŽĪŻ
V510ŽĄ┴ąĘĮ░ĖĮY║ŽÜWų▐▀\äė╦ŃĘ©Ż¼ßśī”3D┐šķg▀Mąą┬ĘÅĮā×(y©Łu)╗» Ż¼▓╔ė├┐╔ęĢ╗»Įń├µ┬ĘÅĮ╬─╝■ī¦╚ļ║═╩ŠĮ╠ Ż¼ūīė├æ¶┐╔ęį▌p╦╔▒ŃĮ▌Ą─ūįČ©┴xĄ─³c─z┐ž╝■Ż¼īóį┌Ģ■į┌³c─ząąśI(y©©)┤¾ėą┐╔×ķŻ╗╗∙ė┌īŹĢrŽĄĮy(t©»ng)Ą─?ąą┼─öz╝╝ąg Ż¼ Są═╦┘Č╚Ū·ŠĆęÄ(gu©®)äØŻ¼║═ 64▌SEtherCAT║═├}ø_▀\äė┐žųŲ ╣”─▄Ą─V510ŽĄ┴ąĘĮ░Ėæ¬ė├ė┌╣żśI(y©©)ĮMčbĄ─¼F(xi©żn)ł÷Łh(hu©ón)Š│Ż¼┐╔ęį┤¾Ę∙Č╚╠ß╔²╔·«a(ch©Żn)ą¦┬╩║═ŲĘ┘|Ż¼╩▄ĄĮ║▄ČÓ╣żśI(y©©)┐═æ¶Ą─ÜgėŁĪŻ▀\äė┐žųŲ▀^│╠ųąĄ─Š½┤_╬╗ų├▒╚▌^▌ö│÷Ż¼ ▀\äė┐žųŲ┼cęĢėXĪó─ŻöM ┴┐Ą─īŹĢrĮ╗╗ź ║═«É│ŻĄ¶ļŖöĄ(sh©┤)ō■(j©┤)▒Ż│ųĄ╚╠ž³cV510ŽĄ┴ą┐╔ęįÅVĘ║Ą─æ¬ė├ė┌Ė„ĘNąĶꬊ½├▄£y┴┐Ą─╣żśI(y©©)¼F(xi©żn)ł÷ĪŻ
|

