���ߣ���¡���ָ���������A
ժҪ��
�������Ȼ���CANopen�ߌӅf�h������CANopen�O��ģ�ͺ�CANopen����ϵ�y������������HMI��CANopenϵ�y�����ͨ�^�M�Bܛ��CAN�ӣ����FCANopen�O����˙C������롣�������˙C�������ģ�����HMIϵ�y�F�������O�䔵���ɼ�ģ�ͣ�����HMIϵ�y�Pע��CANopen�f�h�ă��ݣ��U���˷���CANopenͨ�Ņf�h���O���ڬF�������ϵđ��ã����o���˾��w�đ���ģ�͡�
�P�I�~��
HMI���˙C���棩��HMIBuilder���M�Bܛ����CANopen��
1. ϵ�y����
�M�Bܛ���������I�Ԅӻ��I��ĸ��N�˜�֮�ϵģ�Ԕ���ܘ�ՈҊ�D1.1��
HMI��Human Machine Interface��ϵ�y�ѽ��ɞ鹤�I�F����һ��ú��ġ�ܛӲһ�w�����Ϲ��I�˜ʡ�
ͨ�^�M�Bܛ���ӽӿڣ��M�Bܛ���ɼ��F�������O��Ĕ��������F�������D�o�M�Bܛ�����r�����죬��ͨ�^�˜ʿؼ��@ʾ������Ϣ��ͨ�^�˜ʴ�P�ӿ���ɚvʷ�惦���Լ��������ܣ������߉���Ñ������ȣ����ͨ�^���r������ͽM�B�ӽӿڣ�߀���Ԍ��F����ϵ�y��PLC�����܃x�������������O��Ŀ��ơ�
��ϵ�y�У��F�������O������Ϣ��Դ�^���B�Ӳɼ���������̖�������c���ƈ��І�Ԫ������ͨ�^ݔ�벿�֣��ɼ��؝�ȡ��߶���̖��ģ�M���ɼ���AI�����_�P��ݔ�루DI����̖��ͨ�^Ӌ��Ϳ��Ʋ��֣����F�����D�Q�����Д��Ӌ���߉���ƣ������ݔ�����֣�ͨ�^늉��������ģ�M��ݔ����AO�����_�P��ݔ����DO�����п��ƽY����
�D1.2����������ˬF�������O��Ȳ����졣���I�Ԅӻ��I���O��Ȳ��Y����Ҏ�ɿ�ѭ�������Ԙ˜ʻ�����F�������ߌӅf�h�O��ģ�͵Ę˜ʻ��ṩ���������ͱ��ϡ�
2. CANopen�O��
2.1. CANopen�f�h
�D2.1
[1] CAN��CANopen�˜���OSI�W�jģ���е��Pϵ��D
CANopen�f�h��CiA(CAN-in-Automation)�M�����x�Ę˜�֮һ��CANopen�f�h�ѵõ��V�����J�ɣ����ɞ�CAN�����ڹ��I�Ԅӻ��I��������˜ʡ�
����OSIͨӍģ�ͣ�CAN�����f�h�H�H���x������Ӻ͔����·�Ә˜ʣ���CANopen�f�h����CAN2.0A�f�h���A�ϵđ��ÌӅf�h��
ͨ�^�D2.1���҂���������ؿ���CANopen�f�h��CAN�f�h���Pϵ��Ҳ�����f��CAN�f�h�ǹ̻���CAN������оƬ�еģ������҂��x���w����SJA1000CAN���������tCAN�˜ʅf�h�ѽ��ڿ������Ќ�������̻���CANopen�f�h�Ǒ��ÌӅf�h��Ҳ������Ҫ�҂���ܛ�����̌��F��
���ԣ�CANopen�f�hҲ�w�F�˿����O���ڑ���ܛ���е�ӳ���Pϵ���O��݆��������Device Profile����
2.2. CANopen�O��ģ��
�F�����������þ��nj��ӽ����Ќ��濂���O�����Ϣ�l�ͽo����ϵ�y�Ĺ��������վϵ�y��CAN�f�h�Q����CAN����֧�ֶ�����ͨӍ��ʽ��ʹ�ό�ϵ�y���Ը���N�ķ�ʽ�@ȡ�����O�����Ϣ������CAN2.0A�f�h��CANopen�f�h���x�˹��I�Ԅӻ��I��Ŀ����O��ģ�ͣ����_�˿����W�j�Ĺ��������x�˿����O��ȵĸ��N��Ϣ������Ҏ�����O���O�õľ��w������
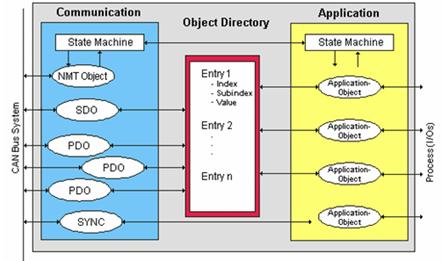
�����Ԅӻ��F����Ҫ��CANopen�O�����������̖I/O���ɼ��F���������ϲ��B��CAN��������ߌӂ����O����Ϣ��CANopen�f�h�鿂���O�䶨�x�ˑ��ó���ܛ���������ֵ��CAN-busͨӍ����D2.2�f���������g���Pϵ��
�D2.2
[1] CANopen�O��ģ���Б���ܛ���������ֵ��ͨӍ���ֵ��Pϵ�D
Communication Interface��ͨ�Žӿڣ���
CANopen Object Directory�������ֵ䣩��
Application������
�����S���ṩ��CANopen�O�䶼�����ѭ�f�h�Ę˜ʣ��҂������O��S���ṩ���Y�ϻ��g�փԵĕr�������ҵ����Beckhoff��˾�Ŀ����O����������Ҋ�D2.3����
�D2.3
[1] Beckhoff��˾CANopen�O������
2.3. CANopenϵ�y����
CANopen�f�h���ÿ��Է֞�����2�����棺
�������Ì��棺 �F�������ˆT���F���O��z���ˆT���Pע���Pע�ɿ��ԡ��ײ����ԺͲ���Ч�ʡ�
Ŀ�ˣ��O�y���ƣ����a������ ���c���PעCANopen�f�h�����P���ݡ�
ϵ�y�O�Ì��棺 ϵ�y���ɼ��g�ˆT���O��S�o�����ˆT���Pע��ͨ�^��ѵķ��������F����ϵ�y��
Ŀ�ˣ����̌�ʩ��ϵ�y���ɡ� ���c���PעCANopen�f�h���w��
�IJ������Ì��濴�����g�����ˆT��Ҫ��ͨ�^�ѽ��γɵ����a��������CANopenϵ�y��ɼȶ������a������Ҳ����ͨ�^�ɼ�����̖�ă���չʾ�ͷ����Y�����Pע����ͨ�^�O����ɵ����a������Ҳ���ǣ������ˆT�Pעͨ�^���_�IJ������������������a�΄ա��@��������Ñ����˙C����ϵ�y����Kʹ���ߡ����I�˙C����ϵ�y���OӋ��횿��]�@�����摪�õ�����
��D2.4��ʾ���F������ϵ�y�У��˙C���沿���������w�F�������Ì��档
��ϵ�y�O�Ì��濴�����g�ˆTҪ���F���O���M���b�䡢�O�ã��������̡����g�ˆT���Ը����O����f���ęn�������F�����̵������M���b����O�á�һ����f��ÿ�N�O�䶼�Мyԇ��������ܛ��������߉�����O�䣬�����þ���ܛ��������PLC��CANopen�O��Ҳ����ˣ����ȣ��@Щܛ�����ѽ��dz����죬Ȼ����ͨӍ�����кܶ�_�ŵļ��g�����ԣ��҂���횽������O��S���ṩ��ܛ�����@������ļ��g�ˆT������������ᘌ��_����I/O���֣��������_�Ĺ�ˇ�����M���O��M�B��ϵ�y���ɵȹ������Pעϵ�y���ɲ��֣�Ҳ���Ǹ����������Ì���ľ��w�����M��ϵ�y���ɡ�
��D2.4��ʾ���F������ϵ�y�У����a�{ԇ�O���ܛ�������w�Fϵ�y�O�Ì��档
�����˙C����ĽM�B���҂���Ҫ�ǿ��]�������Ì��������Ҳ�����PעI/O��B���������P�ą����O�á��\�нY����ӛ䛵ȡ��@Щ�����HMI�ĬF����������ƽ�_�ąf�hͨӍģʽ�Č��F�ṩ��������
HMI�M�B�Pע�Ĕ���������Ҫ���^�̔�������PDO��������CANopen���c�g�����^�̔���,��I/Oģ�K��I/O��B���xȡ���O����ģ�M���ɼ���ģ�M��ݔ���ȵȡ�
Node���c-->HMIƽ�_��TxPDO���l���^�̔�������
Node���c<--HMIƽ�_��RxPDO�������^�̔�������
ϵ�y�����Pע�Ĕ���������Ҫ�Ƿ��Ք�������SDO��Server Data Object�����������x�����c�Č����ֵ䣨Object Dictionary���Á����O��֮�g��ݔ��ĵ̓��ȼ����������F��Ϣ�����d/�ς���Ո��/���𡢷ֶ�/���ق��͵Ȳ������Á�����CANopen�W�j�ϵ��O�䡣
�����Ĕ��������������ġ��A���x���ġ�������ģ�ϵ�y���Õr��һ���ʹ�á����������ƹ�ˇ���ڲ������Ì��棬�^��ʹ���@Щ��������
2.4. CANopen���R���͔�������
���˜p�ٺ��ξW�j�ĽM�B��������CANopen���x�ˏ����Ե�ȱʡ���R����CAN-ID����������@Щ��־�����A������B�¿��ã�ͨ�^�ӑB����߀����������CANopen�O����������֧�ֵ�ͨӍ������ṩ�����Ę��R����
ȱʡID������ǻ���11λCAN��ID������һ��4λ�Ĺ��ܴa���ֺ�һ��7λ�Ĺ��cID(Node-ID)���֡���D4��ʾ��
�D2.5
[1] PDO��������11λID���A���x��ʽ
Node-ID������CANopen�O�䣬��ϵ�y�����̶��x������ͨ�^�O���ϵēܴa�_�P�O�á�Node-ID������1~127��0�����S��ʹ�ã���
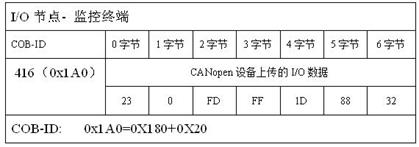
Function Code���_��CAN������ͣ����磺PDO ��SDO������CANopen�O��ļĴ�������CANopen�O���У����õ�PDO��0x180+Node-ID������0x180����ָFuncton Code��SDO ���Á����O��֮�g��ݔ��ĵ̓��ȼ������ķ��Ք��������͵Ĺ���������CANopen�W�j�ϵ��O�䡣
���磬PDO �Á��ݔ8�ֹ�����ٔ������]�������f�h�A�O������ζ�������������A�ȶ��x���� ���磺ij�A�ǂ������ς��Ğ�7���ַ����������8��PDO������Ҫ�����F�������ϡ����R���ĸ�ʽ��TPDO=0X180+NODE_ID����˰l�͵�PDO���Ա�ʾ���3.1��������
��3.1 CANopen�O���PDO
3. �M�Bܛ��ͨӍ
3.1. PC-based��CAN��������
�M�Bܛ���cӲ���O��M�ɵ�CAN����ϵ�y��Ԕ���M��ՈҊ�D3.1��
�D3.1 CAN����ϵ�y
3.2. ����HMI��CANopenϵ�y����
1��������ϵ�y��HMI + CANopenģ�K��
�˙C����aƷ����ֱ���B��CAN��վģ�K����D3.2��ʾ��CAN��վģ�K��Ҫ��I/Oģ�K�����Բɼ�ģ�M��I/O�������߿��Ɣ�����I/O����ͨ�^������ʽ�Uչ�����磬��CAN�ӿڵ�HMI�O��HMITECH TPC-CAN��ֱ���B�ӷ��mAxiomatic���S���p�S�A�ǂ�������
�˙C����aƷҲ����ֱ���B��CAN��վģ�K����D3.3��ʾ��CAN��վģ�K�����ǬF������ͨӍ�Ŀɾ��̿����������ԔUչֱ��I/Oģ�K��Ҳ�����B�ӿ��ƿ����Uչģ�K�����磬HMITECH TPC-CAN�B��EPEC 2020����ģ�K��
2�������sϵ�y��HMIϵ�y+CANopenվģ�K+�\������ù��c��
HMI��Ҫ���CANopenϵ�y�Oҕ�ʹ惦���������ܡ��˙C����ă������Ѻõ��˙C���������ԣ�ͬ�˙C�������P��CANϵ�y��Ϣ�����@ʾ�����������惦�������ij�����������CANϵ�y���˙C�������Pע�����c��
CAN��վ������ע�،��r�ԣ�HMIϵ�yע���Ѻ��@ʾ�͔����惦���mȻ��CAN��վ��������߉Ҳ���Բ����D�Ƶ�HMIϵ�y�����ǣ��҂�߀�ǽ��h�͑��������ƹ�ˇ��Ҫ�����ؿ��]������������ϵ�y��
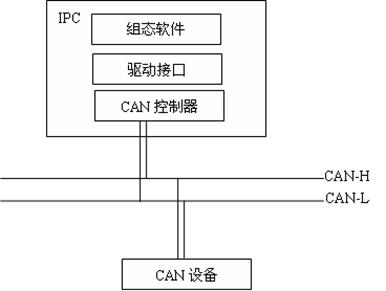
4. �M�Bܛ��CAN��
4.1. �M�Bܛ��CAN���ض�
�D4.1 �M�Bܛ��CAN��
�M�Bܛ����CAN�ӳ�����D4.1��ʾ�����˙C����ͽM�Bܛ���Ľӿڣ��书�ܺ����c�ǣ�
CAN�����������f�o�M�Bܛ���Ľӿڣ�
����ͨ�^��N��ʽ���C�����l�ͺͽ��ճɹ���
�PעCANopen�f�h�������Ì��棺
����ͨ�^��N��ʽ���ϔ����������Ժ͌��r�ԣ�
4.2. HMIBuilderܛ��CAN��ӳ���Pϵ
4.2.1. HMIBuilder�M�Bܛ��
HMIBuilder�M�Bܛ���DZ��������v�M�Ƽ��lչ����˾��Http://www.hmibuilder.com���Ƴ��ķֲ�ʽ�M�Bܛ�����F��������HMIBuilderܛ���Pע�����c֮һ��
4.2.2. HMIBuilder�O��վ��������PCI1680U��һ��Port��
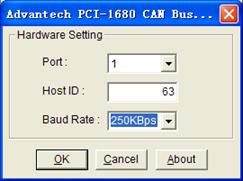
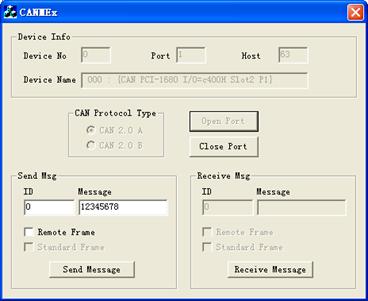
ᘌ����APCI-1680U�忨�����O��վ�����O���У���˿ڡ��O��̖�����x��Ҋ�D4.2���������ʿ����O��������Port1���O��̖��0�������ʣ�250K���@Щ����Advantech Device Magnager�е�HardwareSetting��Ҋ�D4.3������f�h��ͺ��h�̎���ʽ����CanMEx.exe�yԇ�����Ќ�CAN�����Mһ���O��(ԔҊ�D4.4)������CanMEx.exe�ڰ��b���ADemo��Ŀ��У���C:\Program Files\Advantech\CAN\CAN Examples\Examples\VC\CanMEx����
�D4.2 վ�����x��
�D4.3 HardwareSetting
�D4.4 CanMEx
4.2.3. HMIBuilderģ�M��CANopen���Ĕ�����
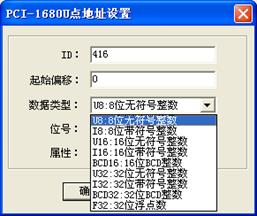
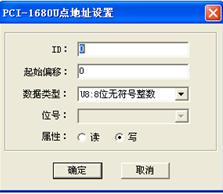
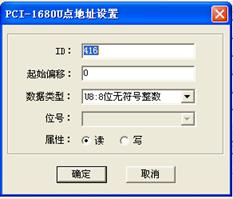
�ڈD4.5�У�����Message���ݞ锵�����ASCII�a��ʽ��a����HMIBuilder�У�PCI1680U�������c�������O�÷�����D4.5�����У�ID����CANopen�O���PDO�����Ҫ�xPDO������ĵ�һ��Byte��������ô�O�����£�416:0:U8:R��Ҳ����416��ʾ�O��ID��0��ʾƫ������U8-��ʾ8λ�o��̖���Ρ�Ҳ�����f����ʼƫ�ƞ锵�������ֹ���ƫ�ƣ�ȡֵ��0��7���������F32������ͣ���ʼƫ��ȡֵ��0��1��
�D4.5 �c�������O��
ע�⣺���ӵĽ�a��������8λ�o��̖������8λ����̖������16λ�o��̖����������̖������16λBCD������32λ�o��̖������32λ����̖������32λBCD������32λ���c����
5.������
���棬�҂�ᘌ����mAxiomatic��˾MVINC-CO-x-range��̖�A�ǂ����������FCANopenģ�K���˙C������롣
1�������B��
�ʂ��������_�Ӿ����B�����A��PCI-1680U�忨��Ȼ�������A���S�C�yԇܛ���M�Мyԇ������yԇͨӍ��ɺ����M����һ�����B�ӎ�CANͨӍ����һ���O�䣬���@���҂��yԇAxiomatic��˾MVINC-CO-x-range��̖�A�ǂ�������
2���A�ǂ���������
ͨ�^��x�������ļ��g�f���ęn���҂���Ŀ����ͨ�^�M�Bܛ�����Կ��ƃA�ǂ������Ć��Ӻ�ֹͣ��ͬ�r�ɼ��������ăA����Ϣ��ģ�K�Ć��Ӻ�ֹͣ����ͨ�^NMTָ��F��ģ�K�ăA����Ϣͨ�^TPDO1�������������ς����҂�Ҳ֪��ͨ�^SDO���������Ì����ֵ䣬ͨ�^���O�÷��գ�LSS��Layer setting service�������O��ģ�K��Node-ID�Ͳ����ʵȣ����ǣ��@Щ���DZ��ĵ�Ŀ�ˣ�Ҳ���ǣ��@Щ���Dz������Ì����Pע�ģ�����ϵ�y�O�Ì����Pע�ġ�
3��HMIBuilderվ�����M�B
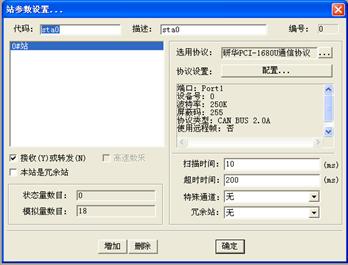
�O��һ��վ���x���ӳ������£�
�D5.1 վ�����O��
���Åf�h,�����O�����£�
��PCI-1680U�忨�ĵ�һ���˿ڽ��Ք������������O�����x��Port1,�O��̖�x���һ���O�䣬�������x��250k���͂�������������ͬ�������δa��255��
�D5.2 ͨ���O��
4���A�ǂ�������NMT����M�B
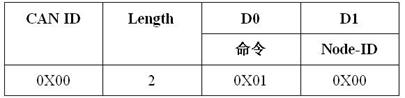
��5.1
[3] �W�j���팦��NMT���������ĸ�ʽ
CAN-ID�����0X00����ʾ���������й��c���������P���������
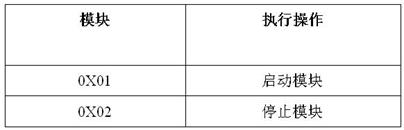
�����飺
��5.2
[3] CANģ�K����
��HMIBuilder�����M�B�У��҂��O�Æ���CANģ�K2��ģ�M��������D��Ҫ��ID����0��ƫ�Ƶ�ַ�B�m������քe��0��1��
�D5.3 ģ�M�������O��
ע�⣺
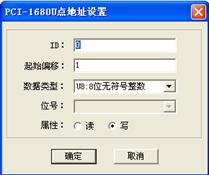
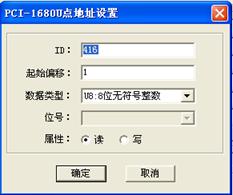
��ַ��0��ƫ������0
�D5.4 ��ַ�oƫ��
��ַ��0��ƫ������1.
�D5.5 ��ַƫ��һλ
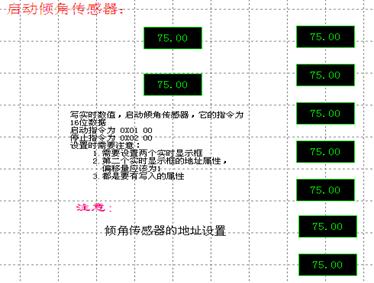
5���A�ǂ�����TPDO1����M�B
ͨ�^�A�ǂ��������P���g�ęn���҂����Բ쿴�O�䶨�x�Ĕ��������ֵ䣬�_���������ĵĔ�����ă��ݡ�����TPDO1������MVINC-CO-2-180ģ�K��CAN�������İl��7���ֹ������������Ķ��x�飺
Sub1�龕�Ƚǣ�Latitude angle����16Bits��
Sub2�齛�Ƚǣ�Longitude angle����16Bits��
Sub3��ضȣ�temperature����8Bits��
Sub4���o��ݔ�루Auxiliary Input����16Bits��
��5.3
[3] MVINC-CO-2-180ģ�K��TPDO1����Ĕ����ֵ����
�A�ǂ������ς������ĸ�ʽ��
��5.4 TPDO1����Ĕ�������
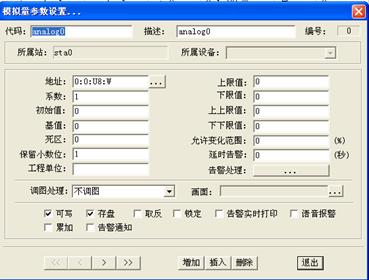
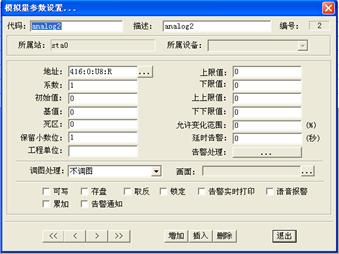
����҂��xȡCANģ�K7��ģ�M����������Ҫ�ڽM�Bܛ�����������O�ã�
�D5.6 ģ�M�������O��
��ַ�O�����£�
�D5.7 �ɼ��ρ��Ĕ���
�D5.7 ��ַ�O�� ƫ��0.����D0��416:0:U8:R
�D5.8��ַ�O�� ƫ��1����D1��416:1:U8:R
ע�⣺
�x�ϵĔ�����7λ��ID��׃���O��ƫ�ƞ�0��6
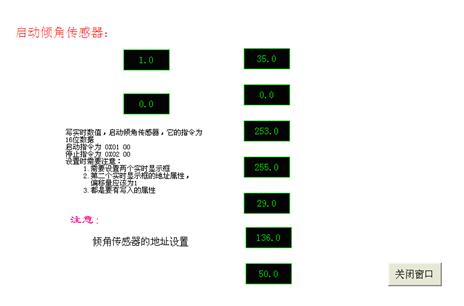
6��HMIBuilder�M�B���
���Æ��Ӯ���
�D5.9 ���Ӯ���
�\����r��
�D5.10 �\�нY
��
6.�Y���Z
ͨ�^HMIBuilder�M�Bܛ����CAN����ͨ���O�ã����F�ˌ��A�ǂ����������IJɼ����Mһ�����҂����Կ�����HMIϵ�y�У��҂���Ҫ�PעCANopen�f�h�Ĕ�������PDO���֣�ͬ�r��������������Ҳ���Ը����F����ˇ��Ҫ���ڽM�Bܛ���Ќ��F��
7.�����īI
[1] CANopenn:high-level protocol for CAN-bus , H.Boterenbrood, NIKHEF, Amsterdam, March 20,2000
[2] ��HMIBuilder�����փԡ� ���������v�M�Ƽ��lչ�Ƽ�����˾
[3] MVINC-CO-X_user_manual_2_08 ,Author:JKA,Modified:25.07.2007 14:28