|
�Ñ����B�m�\�ӿ���������ķnj��Q�Ӝp�ٿ��ƣ�����ͨ�^AS-FPGAPC2���ƿ��ġ��քӜp���c�O�á����܁���Q���������e�Ñ����B�m�\�ӿ�����������ٶȿ��Ƽ���Q�������D�е��f����ʹ�� AX �����w��
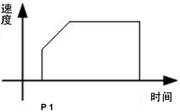
��Ҫ�DP1����ʾ���ٶ�׃���r�����O�����}�_ݔ������ AX.SET.POS.V _ pls ) �����������
AX.SET.POS.V_slp = AX.SFT.POS.V_pls
AxSLPSct AX
���O���քӜp���c�������p�ٕr�g��Ȼ��ʹ��Axlndex ( )�����톢���S��
ע�⣬���σ��г�����к��ƿ����Ԅ��M�ˡ��քӜp��ģʽ���������Ҫ��ͬ���ԄӜp��ģʽ�r����횈��� AxSLPReSet AX ��������ء�
|
��Ҫ�DP 2����ʾ���ٶ�׃���r��ֻ��Ҫ���O���ٶ�ֵ�r��ʹ�ٶȘ����w�е������ٶ��cĿ���ٶȱ���һ�¾Ϳ����ˡ�
|
��Ҫ�DP 3����ʾ���ٶ�׃���r����Ҫ���IJ��팍�F��
1�����S�������ٶ��O�Þ��cĿ���ٶ���ֵͬ��Ȼ���O���Ƅ�����
2��Ȼ������Ƅ������p�ٕr�g��Ӌ��p���c��ֵ�����O���քӜp���c��
AX.SET.POS.V_slp���p���cֵ
AxSLPSET AX
3��Ȼ��ʹ�� Axlndex ( )�����������S��
4���S���Ӻ��������ٶ�ֵ�����M���O�����˕r�S�������ٶȑ��O�Þ����Ŀ���ٶȵ�ֵ��
| ���M���B�m�\�ӿ��ƕr�����ǰӋ���c�����������ĸ��S���Ƅ������ٶȔ����������S��׃�������M�����_�O�ã�Ȼ������ Axlndex( )��������Ӹ��S���S�\���_ʼ�������ƄӱOҕѭ�h�����M�Ќ��\�ӵıOҕ��
����ʹ���۾���֮�g���B��׃��ƽ�������h���B�m�\���_ʼǰ�P�]��COIN ģʽ�����c֮���P�Ę����w������R_exl �����B�m�\�ӽY�������_��COINģʽ��
|